Automation and Robotics
Enhancing Robot Perception With Intelligent Precision Sensing.
Robotics and AI are revolutionizing business in many industries and taking a bigger role in our lives and society. Robots are becoming pervasive, especially where they can assume repetitive tasks or complete safety-sensitive, strenuous, or even impossible missions for humans. By functioning as the interface with the environment, intelligent sensors allow robots to “feel” their surroundings. They can then execute informed tasks based on the input data processed by control and sensor fusion algorithms.

High-performance motion
Dependable robotic solutions need trustworthy, redundant, and cost-effective sensing technology. IMU sensors are ideal for measuring the motion and attitude of the robot. They’re also useful for acceleration, impact and vibration monitoring.
A robotic IMU enables dynamic balancing control by providing information on orientation and kinematics. It can also provide pointing and dead reckoning trajectory estimation when external navigation and mapping references are unavailable.






Intelligent Perception
Sensor fusion is a critical strategy for robotic applications that need to process data generated by different sources. By fusing multi-sensor data, the resulting information is made richer and more reliable. Combining data of multiple sensors is especially required when using robots for complex real-time tasks in dynamically changing conditions. The more IMU a robot has, the more AI and software algorithms it needs. These are fundamental for transforming raw input data into control output signals for motion, interaction, and manipulation.
Check out the other
solutions we offer
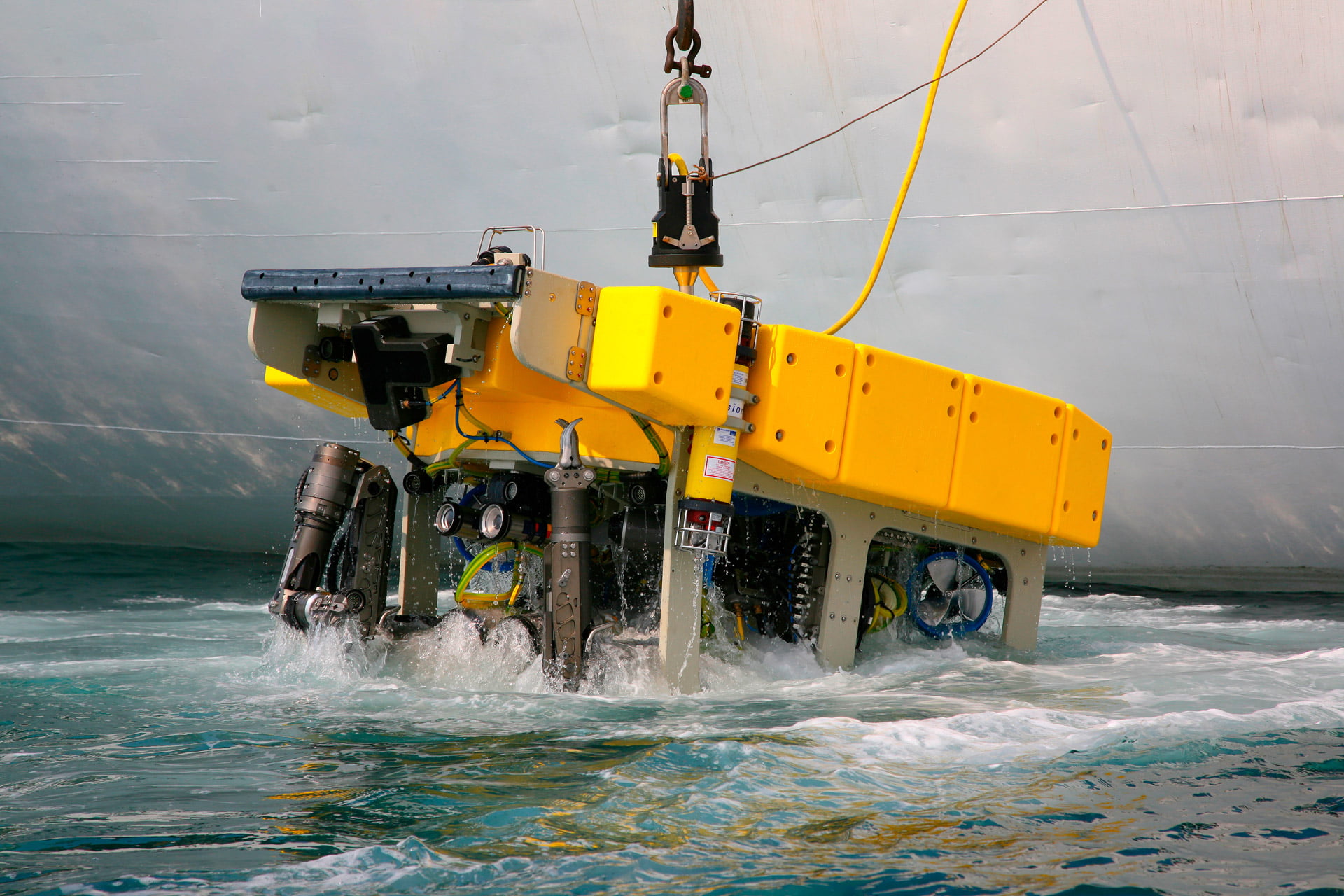
Fields where our systems have been applied
{kind=link}
{kind=link}